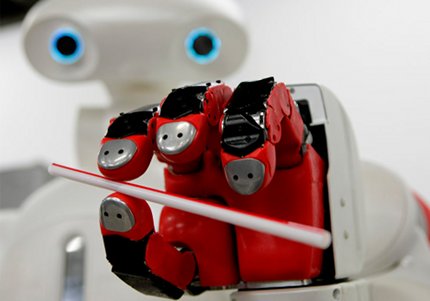
Científicos de Portsmouth y Shanghai están trabajando en un software inteligente que los llevará un paso más cerca de la construcción de la mano robótica perfecta. Mediante el uso de la inteligencia artificial, están creando un software capaz de aprender y copiar los movimientos de la mano humana.
“Estamos hablando de tener un muy alto nivel de control de un dispositivo robótico. Nada de lo que existe hoy en día siquiera se acerca a eso”, dijo Liu. Utilizando un guante de datos virtuales (cyberglove) cubierto de diminutos sensores, capturaron datos sobre la forma en que se mueve una mano humana. Además, se filmó este movimiento mediante ocho cámaras CCD de alta resolución, con iluminación infrarroja y tomaron medias con una precisión milimétrica.
Recientemente Second Life ha llevado a cabo nuevos avances en el control vía mente. Hace poco, estos avances han llevado a que un hombre con una enfermedad debilitante de los músculos, pueda dar una caminata virtual por Second Life.
Esto lo realizan con el fin de convencer a los pacientes de que vale la pena llevar a cabo un programa de Rehabilitación para mejorar su condición.
Navegando por la red, hemos encontrado un nuevo avance para la robótica, Prem Kumar (profesor de ingeniería eléctrica en la Universidad de Northwestern) ha dado un paso importante para hacer más práctica la computación cuántica y más tangible la idea de una futura Internet cuántica con una puerta lógica cuántica en una fibra óptica.
¿En qué se diferencian la Internet actual con una cuántica? Básicamente en que una red cuántica sería capaz de romper los límites de la comunicación por Internet. Hemos leído varias veces que la capacidad de la red de redes podría colapsar, que las velocidades enfrentarían cuellos de botella y que deberíamos olvidarnos del streaming de vídeos en el futuro. Una Internet cuántica podría solucionar todos estos problemas.
Tres equipos de investigación de las universidades de Cornell, Delft (Holanda) y el MIT han logrado construir robots cuyos pasos y movimiento se parecen a la forma de andar de los humanos. El robot desarrollado por el MIT también demuestra un sistema de aprendizaje nuevo, que permite que el robot se adapte de forma continua al terreno sobre el que se mueve. Estos nuevos avances en robótica podrían transformar los actuales sistemas de diseño y control de robots, y podrían ser aplicados al desarrollo de prótesis robóticos.
Los tres robots construidos en las citados universidades se derivan todos del mismo principio: suponen una extensión de varios años de investigación en robots cuyo sistema de movimiento tengan un diseño dinámico pasivo. Los robots de diseño dinámico pasivo son capaces de bajar una cuesta sin motor y su diseño fue inspirado en el tipo de juguete móvil que existen desde hace más de cien años.
La programación de los robots de Cornell y Delft es muy sencilla, porque gran parte del problema de los controles se soluciona a través del diseño mecánico del robot. El robot del MIT utiliza un programa de aprendizaje que aprovecha dicho diseño y permite que el robot se enseñe a si mismo a andar en menos de 20 minutos. Precisamente su apodo, "Toddler" (el término ingles para un niño pequeño que empieza a andar) se deriva de su capacidad de aprender a andar y la forma en la que lo hace.
Este modelo de robot es uno de los primeros robots en utilizar un programa de aprendizaje y es el primero en andar sin tener información previamente implantada en sus controles. Además el sistema de aprendizaje permite que el robot se mueva con eficacia por una variedad de superficies y, en el futuro, podría permitir que se mueven por terreno muy rocoso. Esto se debe a que el programa funciona con tanta velocidad que el robot puede adaptarse de forma contínua al tipo de terreno.
Los tres robots construidos en las citados universidades se derivan todos del mismo principio: suponen una extensión de varios años de investigación en robots cuyo sistema de movimiento tengan un diseño dinámico pasivo. Los robots de diseño dinámico pasivo son capaces de bajar una cuesta sin motor y su diseño fue inspirado en el tipo de juguete móvil que existen desde hace más de cien años.
La programación de los robots de Cornell y Delft es muy sencilla, porque gran parte del problema de los controles se soluciona a través del diseño mecánico del robot. El robot del MIT utiliza un programa de aprendizaje que aprovecha dicho diseño y permite que el robot se enseñe a si mismo a andar en menos de 20 minutos. Precisamente su apodo, "Toddler" (el término ingles para un niño pequeño que empieza a andar) se deriva de su capacidad de aprender a andar y la forma en la que lo hace.
Este modelo de robot es uno de los primeros robots en utilizar un programa de aprendizaje y es el primero en andar sin tener información previamente implantada en sus controles. Además el sistema de aprendizaje permite que el robot se mueva con eficacia por una variedad de superficies y, en el futuro, podría permitir que se mueven por terreno muy rocoso. Esto se debe a que el programa funciona con tanta velocidad que el robot puede adaptarse de forma contínua al tipo de terreno.
No hay comentarios:
Publicar un comentario